企业动态
分拣输送机系统的驱动装置是驱动执行机构运动的传动装置,其驱动装置根据动力源的不同,分为液压、气压、电气、机械 、气液联合等多种方式。目前采用主要有液压、气压、电气这三种驱动方式。液压驱动,功率重量比大,可以实现频繁平稳的变速和换向,容易实现过载保护,可以自行润滑,使用寿命长。但是也存在其油液容易泄露污染环境,需要配备油源,成本较高,工作噪声较大。 电气驱动,控制精度高,驱动力较大,响应快,信号检测、传递、处理方便。但是由于这种驱动方式价格昂贵,取限制在一些场合的应用,因此人们寻求其他的一些经济适用的驱动方式。
气压驱动具有着价格低廉 、结构简单、功率体积比高、无污染及抗干扰性强、在工作机械手中应用较多。另一方面,气动技术作业“廉价的自动化技术”,由于其元器件性能的不断提高,生产生成的不断降低,被广泛应用于现代化工业生产领域。在现代化的成套设备与自动化生产线上,几乎都配有气动系统。气动机械手技术已经成为了满足许多行业生产实践要求的一种重要使用工具。表1各给出了各种控制方式的比较:
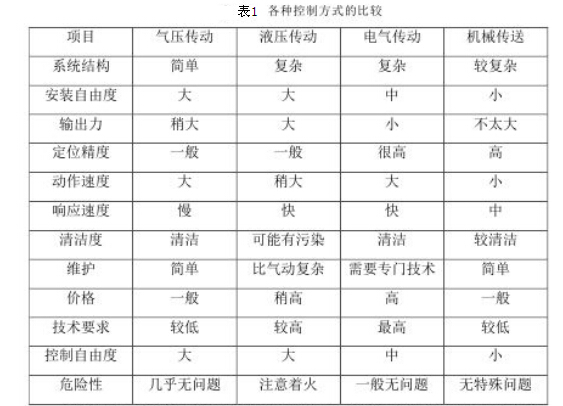
通过以上三种驱动方式的比较选用气动驱动的方式,不仅能够满足其驱动要求,而且节约了成本。
分拣输送机执行机构的选择:
在气压传动系统当中,组成气动回路是为了驱动用于各种不同的目的机械装置,其最重要的三个控制内容是:力的大小、运动的方向和运动的速度。与生产装置相连接的各种类型的气缸,靠压力控制阀、方向控制阀和流量控制阀分别实现对三个内容的控制,正是利用它们组成了各种气动控制回路。现今控制系统当中用分拣物料的执行机构的主要有以下几种:
1、机械手夹持式
夹持式手部的结构与人手类似,是工业机械广泛应用的一种手部形式。它主要是由手指、传动机构、驱动机构进行构成。其又可以分为内撑式、外夹式和内外夹持式,区别在于夹持工件的部件不同,手抓动作方向相反。夹持式手部设计时应该要注意以下事项:手指应该有一定的开闭范围;手指应该具有适当的夹紧力;要保证工件在手指内的定位精度;结构紧凑,重量轻、效率高;通用性和可换性。
2、气吸式
气吸式手部又称为真空吸盘式手部,它是通过吸盘内产生真空或负压,利用压差而将工件吸附,是工业机械手常用的一种吸持工件的装置。它是由吸盘、吸盘架及排气系统进行组合而成,具有着结构简单、质量轻、不易于损伤工件 、使用方便可靠等优点;但要求工件上与吸盘接触的部位光滑平整、清洁、被吸附工件材料致密,没有透气空隙。主要适应于板材、薄壁零件、陶瓷搪瓷制品、玻璃制品、纸格及塑料等表面光滑工件的抓取。