企业动态
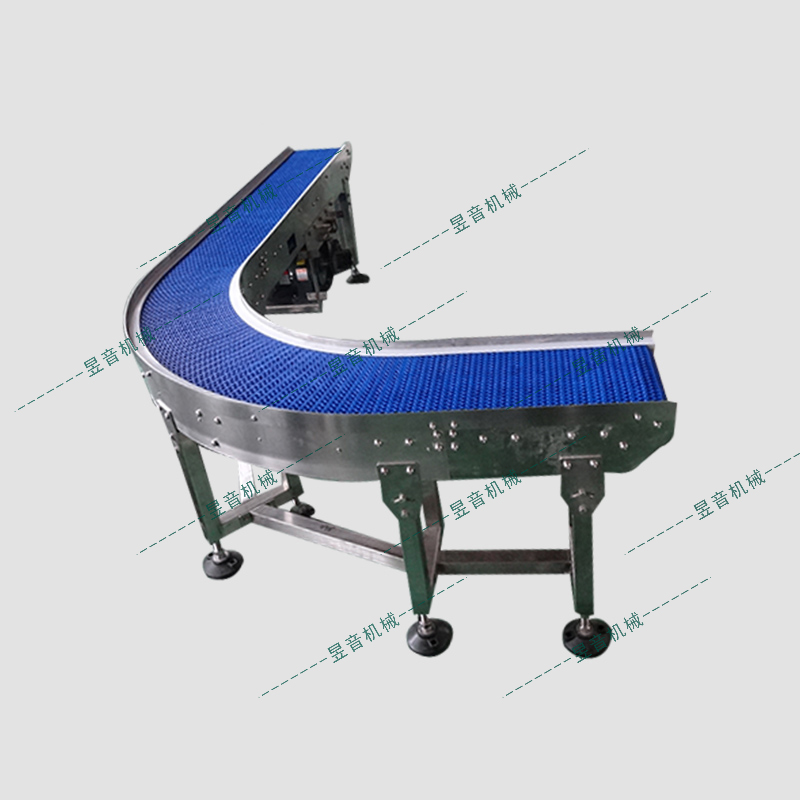
转弯网带输送机械手控制系统的设计是整个机械手设计的关健和核心。它的结构和功能上的合理划分与巧妙实现,对提高机械手整体的可靠性、实用性具有着非常重要的意仪,同时也是降低制造成本、缩短开发周期的途径。
机械手的控制系统一般是使用机械手运动协调为目的,包括高性能的计算机及相应的系统硬件和控制软件。机械手的控制部分可分为四个部分:机械手及其感知器、环境、任务、控制器。机械手是由各种机构组成的装置,它通过感知器的内部传感器实现本体和环境状态的检测和信息交互;环境即指机械手所处的周围环境;任务是指机械手要完成的操作,它需要适当的程序语言描述,并且把它们存入控制机当中,随着系统的不同,任备的输入可能是程序方式,或文字、图形或声音方式;控制器包括软件和硬件两大部分,相当于机械手的大脑,它以计算机或专用控制器运行程序的方式来完成给定的任务。

转弯网带输送机控制系统的硬件一般包括三个部分:
1、感知部分;用来收集机械手的内部的内部和外部信息,如位置、速度、加速度传感器可按受机械手的本体状状,而视觉、触觉、力学等传感器可感受机械手的工作环境的外部状态。
2、控制装置;用来处理各种信息,完成控制过程,产生必要的控制指令,它包括计算机相应的接口等;
3、驱动部分;为了使机械手完成操作及移动功能,机械手各关节可选用气功、液动、电气等方式驱动。
转弯网带输送机控制系统的性能要求
对于一般的转弯网带输送机控制系统有着以下控制的要求:
1、稳定性;稳定性是系统受到短暂的扰动后其运动性能从偏离平衡点恢复到原平衡点状态的能力。稳性定是一般自动控制必须满足的基本要求,对稳定性的研究是自动化控制系统中的一个基本问题。
2、过渡过程性能;描述过液过程性能可以用平衡性和快速性加以衡量,平衡性指系统由初始状态运动到新的平衡状态时具有较小的超调和震荡性;系统由初始状运动到新的平衡状态经历的时间表示系统过渡过程的快速程度。
3、稳态误差;稳态误差是在过渡过程结束后,期望的稳态输出量与实际的稳态输出量之差。控制系统的静态误差越小,说明控制精度越高。因此,稳态误差是衡量控制系统性能好坏的一项重要指标,控制系统设计的任务之一就是兼顾其他性能指标的情况下,使得稳态误差尽可能小或者小于某个允许的限制值。http://www.sdlchache.cn/网带输送机技术整理发布。